Настройка отработки траектории
{kind=link}

В автоматизированной подготовке управляющих программ особое внимание должно уделяться цепочке CAD > CAM > Постпроцессор >ЧПУ.
В CAD системах конструируются геометрические модели на основе поверхностей высокого порядка и сложной кривизны. При создании траекторий движения инструмента САМ системы часто конвертируют CAD поверхности свободной формы в полигоны. Проще говоря, гладкая поверхность сложной формы, разбивается на огромное число небольших поверхностей. Разрешение модели данных (поверхности/полигоны) в системе CAD является основой для обеспечения точности детали. Любая трехмерная геометрическая модель имеет допуск на погрешность моделирования. Если обрабатываемые поверхности созданы с недостаточным разрешением, то невозможно получить необходимую точность в последующих процессах. Точность NC-данных в системе САМ задается при помощи допусков/хордовой ошибки (см. рисунок 1) при построении траектории движения инструмента, пользователь сам выбирает тот допуск, с которым будет строиться траектория по уже преобразованной поверхности.

Рисунок 1. Изменения контура
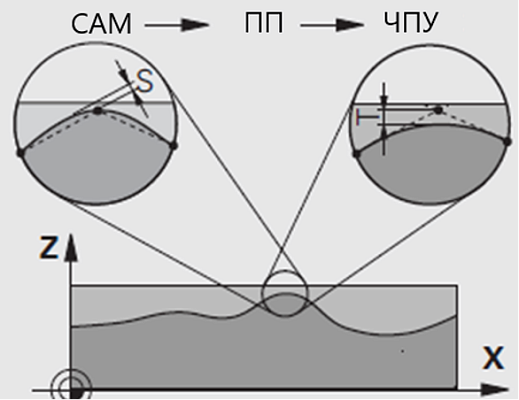
Другими влияющими факторами являются минимальное расстояние между кадрами управляющей программы и допуск на их сопряжение. Это не допуск на позиционный размер с чертежа, а величина разброса распределения точек при генерации траектории (см. рисунок 2). Данные величины имеют непосредственное влияние на величину выводимого файла траектории движения инструмента и время вычисления управляющей программы.

Рисунок 2. Погрешность хордовой ошибки генерации траектории
На практике погрешность хордовой ошибки распределения точек в управляющей программе, должна составлять не более 50% от допустимого отклонения.
При обработке программируемого контура система управления вначале производит фильтрацию облака точек при помощи сконфигурированных фильтров номинального значения положения. При этом числовое программное управление придерживается заданного допуска. Значение допуска поумолчанию указывается в машинных параметрах системы управления. Программист может изменить это значение в управляющей программе с помощью специального цикла созданного производителем системы управления.
При варьировании величинами допусков поведение различных фильтров системы управления может также изменяться.
При задании величины допуска на погрешность хордовой ошибки САМ, рекомендуемое значение лучше выбирать исходя из диапазона от 1,1 до 2-кратной величины ошибки. Для наиболее лучшего восприятия вопроса, предлагаю абстрагироваться от числового программного управления и представить гоночный автомобиль, несущийся с огромной скоростью по трассе. Если ширина дорожного полотна будет равна ширине автомобиля, то гонщику очень сложно будет разгоняться и закладывать виражи на высокой скорости одновременно удерживая автомобиль в полосе, но стоит гонщику выехать на трассу, на которой дорожное полотно в 2 раза шире автомобиля, как скорость и динамика прохождения виражей существенно увеличатся. Но вместе с этим траектория прохода виражей изменится. Именно по такому же принципу система управления отрабатывает траекторию движения инструмента, а «дорогой» является поле допуска, задаваемое в специально цикле управления траекторией.
Путем задания параметров в цикле, можно влиять на результат высокоскоростной обработки контура, в отношении его точности, скорости и качества поверхностного слоя, в соответствии с тем, как производитель станка адаптировал систему управления к характеристикам оборудования.
Как правило, в таком цикле есть ряд настроек, позволяющих конфигурировать поведение станка при обработке, например, допустимое отклонение от контура, режим переключения фильтров высокоскоростная черновая/чистовая обработка, допуск на точный останов осей вращения. Допустимое отклонение от контура (см. рисунок 3), является величиной отклонения, позволяющей системе управления автоматически сглаживать траекторию между любыми элементами контура (скорректированными или нет). Таким образом режущий инструмент имеет постоянный контакт с обрабатываемой поверхностью детали, при этом механика станка подвергается меньшему износу. Кроме того, определенный в цикле допуск действует также при перемещениях по дуге окружности. Весь диапазон допуска используется полностью только при необходимости, например, из-за сильных искривлений контуров.

Рисунок 3. Допустимое отклонение от контура
Режим переключения фильтров высокоскоростная черновая/чистовая обработка (см. рисунок 4), позволяет производить чистовую обработку с высокой точностью контура. Система управления применяет определенные производителем станка настройки фильтра для чистовой обработки. При черновой обработке будет обеспечиваться наилучшая производительность с большими допусками.

Рисунок 4. Высокоскоростная черновая/чистовая обработка
Допуск на точный останов осей вращения работает только при активной функции RTCP (5-осевая обработка). C помощью него можно задать допуск на позиционирование наклонно-поворотных осей (см. рисунок 5).

Рисунок 5. Допуск на точный останов осей вращения
При периферийном фрезеровании (фрезерование боковой поверхностью) не следует выбирать слишком большое значение углового допуска. Так как это может привести к зарезам на контуре. В основном данная настройка применяется для фрезерования сферическим инструментом поверхности свободной формы, когда контакт по сфере может варьировать в зависимости от угла и не вредить контуру.